Come funzionano i sistemi interferometrici?
Come funziona l'interferometria
Introduzione
Lo strumento più noto in questo campo è l'interferometro di Michelson, inventato nel 1887 da Albert Abraham Michelson, il primo americano insignito con il Premio Nobel per la scienza. Michelson ideò un sistema formato da una serie di specchi riflettenti e semitrasparenti (separatori di fascio) per fondere fasci di luce separati, provenienti dalla stessa fonte. L'interferometria laser è un metodo ormai consolidato per misurare distanze con la massima accuratezza.
Principi base
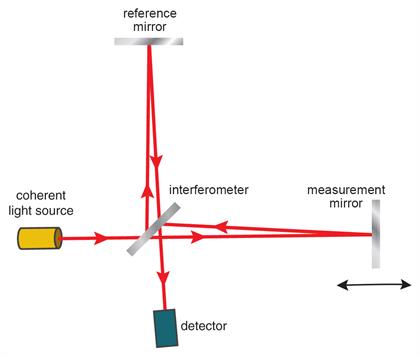
In genere, un singolo fascio di luce coerente viene diviso in due fasci identici tramite un interferometro di Michelson. I fasci seguono percorsi diversi, per poi riunirsi prima di raggiungere il rilevatore. La differenza nella distanza percorsa crea una sfasatura fra i due fasci e dà vita a uno schema di interferenze fra due onde che in origine erano identiche. Il rilevatore identifica tale schema. Se un singolo fascio viene diviso su due percorsi (misura e riferimento), la sfasatura consente di eseguire una diagnosi della causa del cambiamento di fase lungo i percorsi. Le cause possono essere fisiche (la variazione della lunghezza del percorso) oppure vanno ricercate in un cambiamento dell'indice di rifrazione attraverso il quale viaggia il fascio.
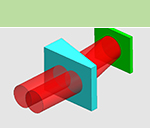
Interferometria di Michelson
Il fascio laser (1) emerge dalla sorgente laser e viene diviso in due (fascio di riferimento (2) e fascio di misura (3)) nell'interferometro. I fasci vengono riflessi dai due retroriflettori e si ricongiungono presso l'interferometro prima di raggiungere il rilevatore.
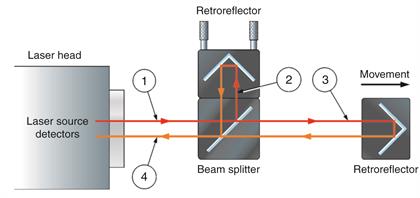
L'utilizzo dei retroriflettori assicura che i fasci che tornano dal braccio di riferimento e da quello di misura siano paralleli quando si ricongiungono sull'interferometro. I fasci ricongiunti raggiungono il rilevatore interferendo l'uno con l'altro in modo costruttivo o distruttivo. In caso di interferenza costruttiva, i due fasci si trovano in fasatura e i picchi si rinforzano a vicenda, producendo una frangia luminosa, Al contrario, se l'interferenza è distruttiva i fasci saranno fuori fase e i picchi del primo saranno annullati dalle valli del secondo, producendo una frangia scura.
Elaborazione del segnale
L'elaborazione ottica del segnale effettuata dal rilevatore consente di osservare l'interferenza dei due fasci. Lo spostamento del fascio di misura modifica la relativa fase dei due fasci. Tale ciclo di interferenze costruttive e distruttive provoca una variazione ciclica dell'intensità del fascio ricongiunto. Un ciclo di variazione di intensità da chiaro a scuro si verifica ogni volta che il fascio/retroriflettore di misura(3) viene spostato di un valore pari a metà della lunghezza d'onda del laser.
Accuratezza del sistema
Per ottenere una buona accuratezza delle misure di posizione lineare è necessario conoscere la lunghezza d'onda del fascio laser. La lunghezza d'onda operativa del fascio laser dipende dall'indice di rifrazione dell'aria attraverso cui il fascio si sposta e che può essere modificato dalla temperatura, dalla pressione e dall'umidità relativa. Per tale ragione, la lunghezza d'onda del fascio deve essere modificata (compensata) in modo da includere eventuali variazioni dei parametri sopra indicati.
Sistemi RLE
Il sistema RLE è un esclusivo sistema di interferometro di tipo omodino (a singola frequenza) avanzato, progettato specificamente per applicazioni di retroazione di posizione. Ciascun sistema RLE si compone di una unità laser RLU e una o due rilevatori RLD10, il cui modello dipende dai requisiti della specifica applicazione.
Simboli:
Funzionamento di RLE
| Sorgente laser | Abbinamento di fibre | Ottiche dell'interferometro | Ottiche di misura | Schema di rilevamento | Segnali di feedback dell'encoder |
 |  |  |  |  |  |
Funzionamento di RLU
Uscita laser da RLU a RLD
| Sorgente laser | Elettroniche di stabilizzazione | Abbinamento di fibre | Stabilità di puntamento del fascio |
|  | |  |
Elaborazione del segnale all'unità RLD
| Segnali di errore dell'encoder | Stato del sistema | Interpolazione digitale | Segnali analogici dell'encoder |
|  |  |  |
Funzionamento di RLD
Uscita laser da RLD alle ottiche di misura
| Ottiche dell'interferometro | Deviatore del fascio |
Schemi ottici esclusivi con SDE minimo, compatibili con ottiche di misura con specchio piano o retroriflettore |  Un sistema ottico integrato che consente di abbreviare i tempi di installazione, semplificando la regolazione angolare del fascio |
Ingresso laser dalle ottiche di misura a RLD
| Segnali analogici dell'encoder | Schema di rilevamento | Ottiche di misura |
 Quadratura analogica intrinseca, generata dallo schema di rilevamento e passata direttamente all'unità RLU | Lo schema integrato per il rilevamento delle frange converte le frange di interferenza, provenienti dalla misura e dal riferimento, in un segnale elettronico | Specchi ad alta riflessività con rivestimento dielettrico duro |
Sistemi HS20

Se usata in combinazione con un kit di ottiche lineari esterne, la testa laser HS20 di Renishaw si trasforma in un encoder laser interferometrico senza contatto per applicazioni su assi lunghi che assicura elevata accuratezza e un ottimo posizionamento per feedback lineare.
La testa del laser HS20 può essere incorporata nel loop del controllo di posizione di qualsiasi sistema di controllo del movimento che possa essere configurato in modo da accettare segnali dell'encoder in formato di quadratura digitale o analogico. La testa del laser può essere installata come elemento sostitutivo diretto di encoder lineari in applicazioni OEM e retrofit.
Funzionamento di HS20
| Sorgente laser | Elettroniche di stabilizzazione | Ottiche di misura | Segnali di | Segnali di feedback dell'encoder |
 Laser HeNe stabilizzato di Classe II (<1 mW) |  Usate per controllare la stabilità della frequenza laser tramite la modulazione del riscaldatore del tubo laser |  Soluzioni con ottiche a lungo raggio per macchine con assi lunghi fino a 60 m |  Linee di errore attive, specifiche per ciascun asse laser, possono essere facilmente integrate nel controllo della macchina, per operazioni ad anello chiuso |  Quadratura digitale o analogica (standard del settore) per feedback di posizione |
Sistemi di compensazione
Spesso si ritiene che gli interferometri laser forniscano la massima accuratezza di misura. Tuttavia, la realtà è più complessa. Quando si utilizza un laser per misurare gli scostamenti lineari "in aria", le prestazioni del sistema di compensazione ambientali diventano determinanti. Il laser e le ottiche di misura interferometriche forniscono livelli elevatissimi di risoluzione lineare e precisione, ma per le applicazioni "in aria" l'unità di compensazione ambientale è la principale responsabile dell'accuratezza del sistema di misura.
Lo scostamento viene rappresentato in termini di lunghezza d'onda specificata. Pertanto, una misura accurata e ripetibile richiede una lunghezza d'onda costante. Quando il fascio laser viaggia attraverso l'aria, la lunghezza d'onda varia in base all'indice di rifrazione.D'altra parte, la misura dell'encoder non tiene in considerazione l'espansione del pezzo di lavoro o della struttura della macchina a seguito delle variazioni di temperatura.
Per compensare tale errore e garantire la massima accuratezza nelle applicazioni "in aria", è necessario ricorrere a un sistema di compensazione ambientale.
Fattori ambientali che influenzano l'accuratezza
Fattori dell'indice di rifrazione:
 |  |  |
Temperatura dell’aria | Umidità relativa: | Pressione dell'aria |
Espansione termica:
 |
Temperatura dei materiali |
Sistema di compensazione RCU10
Il sistema di compensazione con quadratura in tempo reale di RCU10 risolve gli errori ambientali dei sistemi di movimento lineare e migliora l'accuratezza e la ripetibilità dei processi.RCU10 esegue il monitoraggio dell'ambiente macchina tramite una serie di sensori e utilizza l'elaborazione avanzata del segnale digitale per eseguire compensazioni in tempo reale dei segnali del feedback di posizione. L'unità fornisce i segnali di feedback corretti al controllo di movimento, in formato analogico o digitale.

Funzionamento di RCU10
Lo schema di seguito mostra il flusso di lavoro di RCU10.
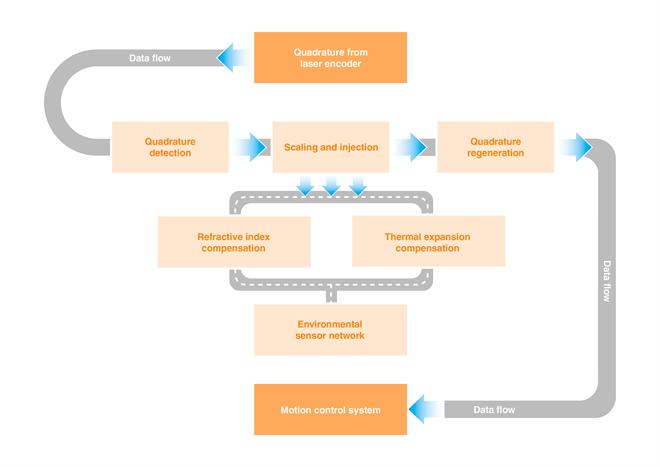
L'unità di compensazione RCU10 accetta la quadratura digitale e i dati ambientali raccolti da una serie di sensori e calcola la quantità totale di compensazione necessaria per correggere la posizione dell'asse. La compensazione richiesta viene applicata tramite scalatura della quadratura e iniezione (aggiunta o rimozione di impulsi di quadratura) nel segnale di feedback dell'encoder. L'intero processo viene completato con una latenza minima nel controllo di movimento. I segnali di feedback corretti vengono forniti al controllo di movimento in formato digitale o analogico.