Supporto per interfaccia seriale BiSS®
Informazioni sull'interfaccia seriale BiSS?
Renishaw supporta l'interfaccia seriale aperta BiSS (unidirezionale) per gli encoder assoluti. BiSS è un'interfaccia seriale ad alta velocità che risulta ideale per assi dinamici che richiedono elevate accelerazioni, ottimo controllo della velocità, ripetibilità bidirezionale e stabilità di posizionamento affidabili.
Gli encoder assoluti Renishaw sono compatibili con un'ampia gamma di controlli, unità, DRO e schede conteggi per PC.
Sono disponibili anche opzioni con interfacce proprietarie per gli encoder assoluti RESOLUTE™, EVOLUTE™ e FORTiS™.
Informazioni tecniche
Informazioni sugli encoder RESOLUTE, EVOLUTE e FORTiS
Gli encoder Renishaw RESOLUTE, EVOLUTE e FORTiS utilizzano l'interfaccia seriale BiSS C (unidirezionale).
Gli encoder RESOLUTE FS e FORTiS FS, per applicazioni che necessitano della Sicurezza funzionale, utilizzano l'interfaccia seriale BiSS Safety.
- Gli encoder rotativi sono monogiro (con 2n conteggi per giro e nessun conteggio dei giri).
- Gli encoder lineari sono disponibili in una gamma di varie risoluzioni (e lunghezze di misura massime), come specificato nelle relative schede tecniche.
Descrizione dell'interfaccia BiSS C
BiSS modo C (unidirezionale) è una veloce interfaccia seriale sincrona per l'acquisizione dei dati di posizione da un encoder.
Si tratta di un'interfaccia master-slave. Il master controlla la temporizzazione dell'acquisizione di posizione e la velocità di trasmissione dei dati,
mentre l'encoder è lo slave. L'interfaccia è composta da due coppie di linee differenziali e unidirezionali:
- "MA" trasmette le richieste di acquisizione della posizione e le informazioni sulla tempistica (clock) dal master all'encoder
- "SLO" trasferisce i dati di posizione dall'encoder al master, sincronizzandoli con MA.
Lo schema di seguito mostra i dati trasmessi.
Formato dei dati

Descrizione dell'interfaccia BiSS Safety
BiSS Safety è una veloce interfaccia seriale sincrona che consente di acquisire dati di posizione da un encoder per applicazioni in cui è necessario assicurare la Sicurezza funzionale. RESOLUTE FS e FORTiS FS utilizzano le comunicazioni BiSS Safety e sono certificati per i seguenti standard di Sicurezza funzionale:
- ISO 13849 Categoria 3 PLd
- IEC 61508 SIL2
- IEC 61800-5-2 SIL2
BiSS Safety è un'interfaccia di tipo master-slave. Il master controlla la tempistica dell'acquisizione della posizione e la velocità di trasmissione dati, mentre l'encoder è lo slave. L'interfaccia è composta da due coppie di linee differenziali e unidirezionali:
- "MA" trasmette le richieste di acquisizione della posizione e le informazioni sulla tempistica (clock) dal master all'encoder.
- "SLO" trasferisce i dati di posizione dall'encoder al master, sincronizzandoli con MA.
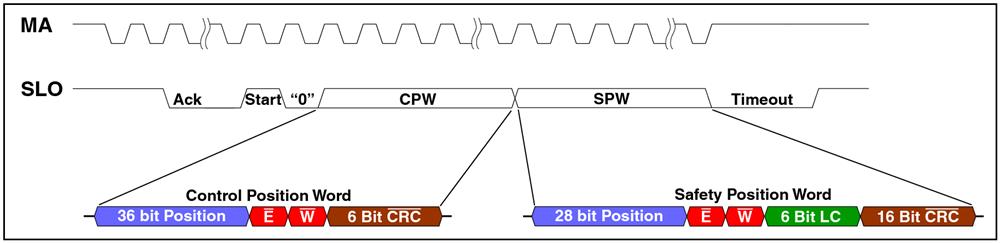
Lo schema di seguito mostra i dati trasmessi.
Il formato delle comunicazioni dei segnali master-slave è RS485/RS422 segnale line-driven differenziale.
Formato dei dati
Di seguito è mostrato un tipico ciclo di richiesta:
- Se inattivo, il master mantiene MA alto. Per indicare che è pronto all'uso, l'encoder mantiene SLO alto.
- Il master richiede l'acquisizione della posizione iniziando a trasmettere impulsi di clock su MA.
- L'encoder risponde impostando SLO basso sul secondo fronte di salita di MA.
- Dopo il completamento del periodo "Ack", l'encoder trasmette i dati al master, sincronizzandoli con il clock, come mostrato nei diagrammi precedenti.
- Dopo che tutti i dati sono stati trasferiti, il master arresta il clock e imposta MA su alto.
- Se l'encoder non fosse ancora pronto per il ciclo di richiesta successivo, SLO vien e impostato su basso (periodo di timeout).
- Quando l'encoder è pronto per il successivo ciclo di richiesta, lo segnala al master impostando SLO su un valore alto.
Encoder assoluti aperti RESOLUTE con BiSS C e BiSS Safety
| Versioni RESOLUTE | Opzioni di sistema |
| Standard | |
| Ultra alto vuoto (UHV) | |
| Gamma delle temperature estesa (ETR) | Anelli rotativi (angolari) |
| Sicurezza funzionale (FS) |
Encoder assoluti aperti EVOLUTE con BiSS C
| Versioni di EVOLUTE | Opzioni di sistema |
| Standard |
Encoder assoluti aperti FORTiS con BiSS C e BiSS Safety
| Varianti di FORTiS | Opzioni per sistemi lineari |
| Standard | |
| Sicurezza funzionale (FS) |


